

Alibaba’s Qwen team has launched the Qwen-Robot Suite, a groundbreaking collection of three foundational models designed to provide a "full stack for embodied intelligence." This ambitious initiative, announced on Tuesday, aims to unify the disparate elements of robotic operation – mobility, manipulation, and environmental understanding – under a cohesive, AI-driven framework. The suite comprises Qwen-RobotNav for mobility, Qwen-RobotManip for manipulation, and Qwen-RobotWorld for simulating the physical realities that govern robotic actions. While each model can function independently, their collective integration is being likened to the "Android moment for robotics," providing a foundational operating system rather than specific hardware. This development marks a significant step forward in the pursuit of more adaptable, intelligent, and versatile robots, potentially reshaping the landscape of artificial intelligence in physical applications.
The Genesis of Embodied Intelligence: Alibaba’s Strategic Vision
Alibaba’s investment in embodied AI, as exemplified by the Qwen-Robot Suite, is deeply rooted in its extensive vertical integration across the technology spectrum. The company stands as a unique entity in China, with a comprehensive ecosystem spanning semiconductor development, cloud computing infrastructure, advanced AI models, robust serving platforms, and end-user applications. Robotics, with its inherent physicality, represents the most tangible manifestation of this integrated strategy. It allows Alibaba to explore and push the boundaries of what AI can achieve when applied to the real world, moving beyond purely digital interactions.
Current AI agents primarily leverage Large Language Models (LLMs) for decision-making. Traditional robotic systems, while advanced, often rely on machine learning models that can lack the inherent adaptability and emergent capabilities characteristic of generative AI. Physical agents, however, face a distinct and more formidable set of failure modes. Instead of grappling with the nuances of natural language prompts, robots must contend with the unforgiving laws of physics, spatial reasoning, and the unpredictable nature of real-world interactions. The Qwen-Robot Suite directly addresses these challenges by providing specialized AI models capable of understanding and operating within this complex physical domain.
Qwen-RobotNav: Navigating the Physical World with Enhanced Mobility
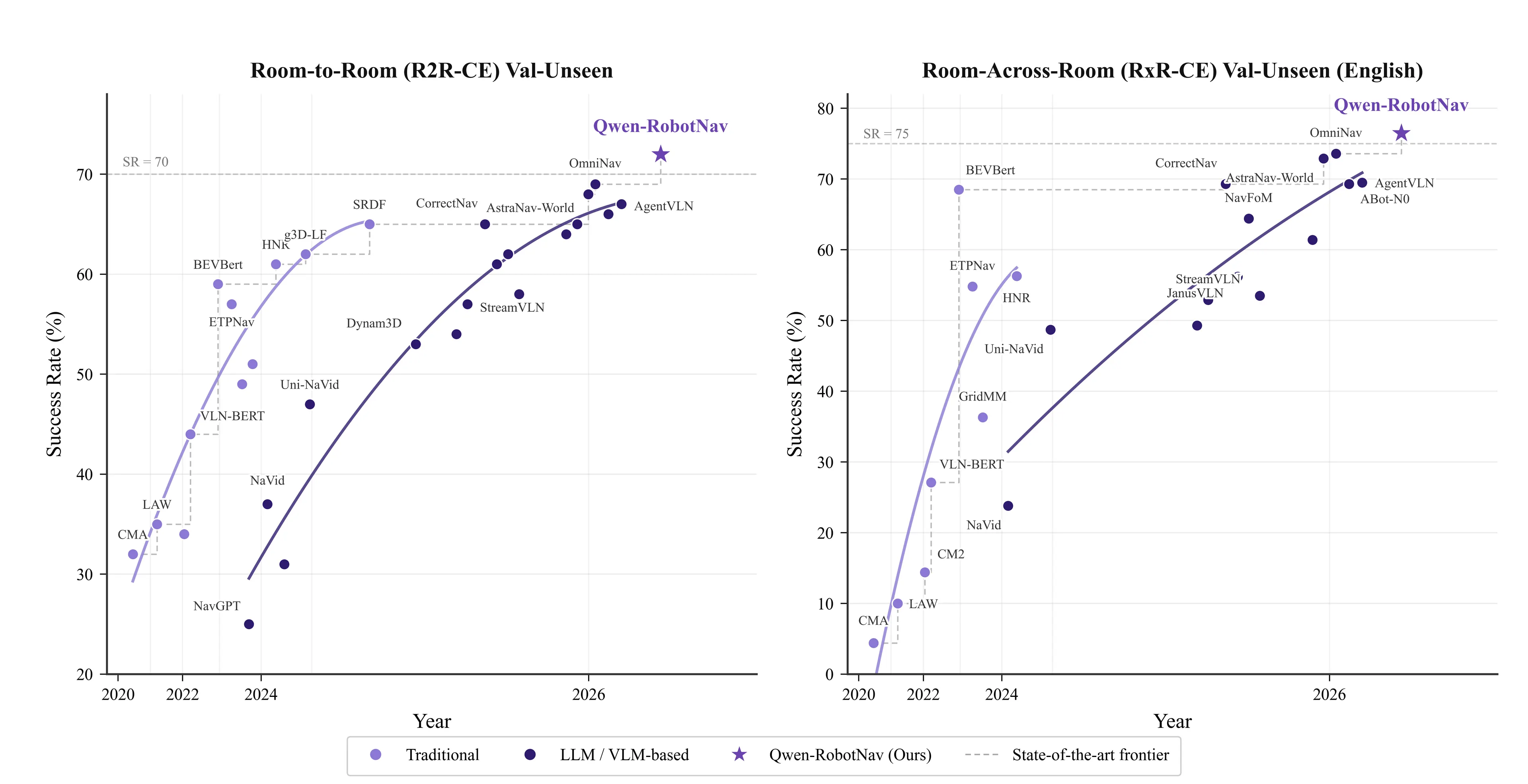
Qwen-RobotNav represents a significant advancement in robotic navigation, unifying five distinct and often challenging tasks within a single, adaptable model. These tasks include following natural language instructions, navigating to a specific point (point-goal navigation), locating objects (object search), continuously tracking moving targets (target tracking), and operating in simulated autonomous driving scenarios. Each of these functions traditionally demands specialized visual memory strategies, often requiring separate models or hardcoded approaches.
In contrast, Qwen-RobotNav introduces a novel parameterized interface that allows for dynamic reconfiguration of its visual memory strategies. Planners can adjust parameters such as token budget, temporal decay rates, and per-camera weights in real-time during an operational episode. This flexibility is crucial for robots operating in dynamic and unpredictable environments where conditions can change rapidly.
The model’s training involved an extensive dataset of 15.6 million samples, with randomization applied across all parameters to enhance its robustness and generalization capabilities. This rigorous training regimen has yielded impressive results on established benchmarks. Qwen-RobotNav achieves a 76.5% success rate on VLN-CE RxR, a benchmark designed to evaluate vision-and-language navigation in realistic environments. Furthermore, it demonstrates a remarkable 90% tracking accuracy on EVT-Bench, a test that assesses an agent’s ability to consistently follow moving targets, a critical capability for applications ranging from logistics to surveillance.
Qwen-RobotManip: Bridging the Gap in Robotic Dexterity
Robotic manipulation, the ability of robots to interact with and modify their physical environment, has long been hindered by the fundamental incompatibility of how different robotic systems represent and execute actions. A seven-axis Franka arm, for instance, operates by controlling individual joint angles, while an ALOHA robot, a popular low-cost bimanual platform in research, defines actions through the precise position and orientation of its grippers (end-effector poses). Humanoid robots introduce yet another layer of complexity, often utilizing whole-body coordinate systems.
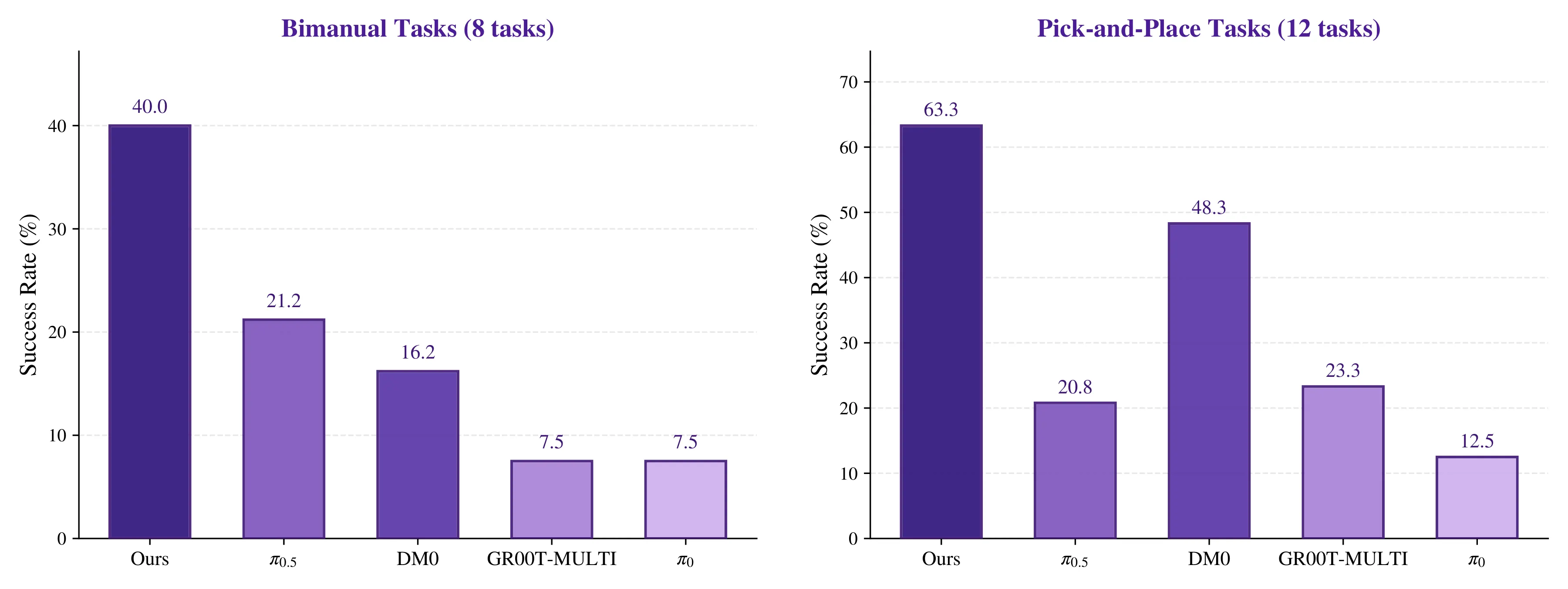
Qwen-RobotManip directly confronts this challenge by creating a unified framework for robotic manipulation. Alibaba synthesized approximately 38,100 hours of training data by drawing from open-source robot datasets and human demonstration videos, notably avoiding reliance on proprietary data collection methods. This approach ensures broader applicability and accessibility.
The model’s effectiveness has been validated by its top performance on the RoboChallenge Table30-v1 benchmark, where it surpassed previous state-of-the-art approaches by a significant 20%. This demonstrates its ability to learn and execute manipulation tasks across diverse robotic platforms with unprecedented efficiency and accuracy. The implications for manufacturing, logistics, and even domestic assistance robots are substantial, promising more adaptable and versatile robotic arms.
Qwen-RobotWorld: Simulating Reality with Language-Driven Understanding
Perhaps the most ambitious component of the Qwen-Robot Suite is Qwen-RobotWorld. This model functions as a language-conditioned video world model, treating natural language commands as a universal interface for action. The core innovation lies in its ability to interpret and execute commands like "Pick up the red cup and pour water on the flower" regardless of the specific robotic agent or its morphology. Whether the actor is a simple gripper, an autonomous vehicle, or a sophisticated mobile navigation agent, the underlying intent is understood and translated into physical action.
The foundation of Qwen-RobotWorld is the Embodied World Knowledge corpus, an expansive collection comprising 8.6 million video-text pairs, translating to over 200 million video frames. This dataset is meticulously curated to cover a wide range of physical interactions:
- Manipulation: 5.9 million samples detailing over 1,300 distinct skills and involving more than 20 different robot morphologies.
- Autonomous Driving: Data sourced from prominent datasets such as Waymo, NVIDIA PhysicalAI-AD, and Bench2Drive, enabling the model to understand and predict complex driving scenarios.
- Indoor Navigation: Leveraging the comprehensive VLNVerse dataset to enhance understanding of indoor environments and navigation tasks.
- Human-to-Robot Transfer: Data from 14 different robot arms, facilitating the transfer of human-learned skills to robotic systems.
Qwen-RobotWorld has demonstrated exceptional performance on several key benchmarks. It ranks first on EWMBench and DreamGen Bench, which are designed to evaluate a world model’s ability to predict and generate realistic physical environments. It also surpasses all open-source models on WorldModelBench and PBench. Crucially, it achieves perfect scores on physics adherence, demonstrating an accurate understanding and application of fundamental physical laws, including Newton’s laws of motion, mass conservation, fluid dynamics, and gravity. This level of physical fidelity is essential for robots to operate safely and effectively in real-world settings.
The "ChatGPT Moment" for Robots: Differentiating from LLMs
The Qwen-Robot Suite is often framed as the "ChatGPT moment" for robots, but this analogy requires careful clarification. While LLMs like ChatGPT excel at predicting the next token in a sequence, thus generating human-like text, the Qwen-Robot models operate on a fundamentally different and more complex principle. Typical LLMs are designed for language understanding and generation. In contrast, the Qwen-Robot models are engineered to understand and interact with the physical world.
A standard LLM can tell you that a glass will break if dropped. Qwen-RobotWorld, however, goes a significant step further. It can predict how the glass will break – detailing the shatter pattern, the physics of fluid dynamics if it contains liquid, and potential secondary collisions with other objects. Qwen-RobotManip, informed by this understanding, can then plan a grasp that actively prevents the drop from occurring in the first place. This integration of predictive physical understanding with proactive action planning is what distinguishes these models from traditional LLMs and marks a pivotal shift towards true embodied intelligence.
Addressing Misconceptions and the Road Ahead
It is crucial to dispel a common misconception: the Qwen-Robot Suite is not a collection of physical robots. Rather, it represents the "brains" or software intelligence that can be deployed on various robotic hardware platforms. Alibaba has indicated that these models are designed to run on hardware from manufacturers such as AgileX, Franka Emika, Universal Robots, and Unitree, among others. This modular approach allows for flexibility and broad adoption across existing robotic systems.
While the technical achievements are undeniable, the path from controlled demonstrations to widespread real-world deployment remains challenging. The benchmarks used to evaluate these models, such as RoboCasa365, LIBERO-Plus, and RoboTwin-Clean2Rand, are primarily simulation-based. Bridging the gap between simulated environments and the unpredictable complexities of real-world deployment is a significant hurdle. Factors such as sensor noise, actuator drift, and the ever-present "long tail" of edge cases have historically humbled even the most advanced robotics efforts. Alibaba’s team acknowledges these challenges, recognizing that the journey towards reliable home-assistance robots or fully autonomous industrial systems is still a long one.
Despite these challenges, the technical breakthroughs within the Qwen-Robot Suite are profound. Qwen-RobotManip’s alignment-first approach, which focuses on harmonizing disparate action representations, addresses a critical bottleneck in cross-embodiment training. Qwen-RobotNav’s parameterized observation interface offers an elegant solution to the problem of adapting context-specific strategies for navigation. Qwen-RobotWorld’s conceptualization of language as a universal action interface represents a promising abstraction for developing cross-domain world models.
Alibaba has not yet disclosed specific pricing structures, deployment timelines, or customer access details beyond initial pilot programs. However, the unveiling of this comprehensive suite signals a significant commitment to advancing embodied AI and positions Alibaba as a key player in the next generation of robotic intelligence. The company’s unique position, controlling the entire technology stack from hardware to AI, provides a strategic advantage in bringing these advanced capabilities to market.
Broader Implications and Future Outlook
The introduction of the Qwen-Robot Suite has far-reaching implications for the field of robotics and artificial intelligence. By offering a unified, open-source "full stack" for embodied intelligence, Alibaba is democratizing access to advanced robotic AI capabilities. This contrasts with competitors who may rely on proprietary data and closed ecosystems. The emphasis on open-source data for training Qwen-RobotManip, for instance, fosters collaboration and accelerates innovation across the broader research community.
The ability of Qwen-RobotWorld to interpret natural language as a universal action interface could revolutionize human-robot interaction. Imagine a future where complex tasks can be communicated to robots in simple, everyday language, eliminating the need for specialized programming or complex command interfaces. This could unlock new applications for robotics in areas such as elder care, personalized assistance, and sophisticated manufacturing processes.
Furthermore, the rigorous adherence to physical laws demonstrated by Qwen-RobotWorld suggests a future where robots can operate with greater safety and predictability. Understanding concepts like mass conservation and fluid dynamics is not merely an academic exercise; it is fundamental to preventing accidents, ensuring task efficiency, and building trust between humans and their robotic counterparts.
While the commercialization timeline remains uncertain, the technological foundations laid by the Qwen-Robot Suite are robust. The suite’s modular design allows for incremental adoption and development, enabling companies to leverage specific components as needed. As the field of embodied AI continues to mature, Alibaba’s comprehensive approach, integrating mobility, manipulation, and world understanding, is poised to set new standards and accelerate the development of truly intelligent and capable robots for a wide array of applications. The journey from research labs to everyday environments is complex, but with initiatives like the Qwen-Robot Suite, the destination of intelligent, physically embodied AI appears closer than ever.
