
The automotive industry is currently navigating one of the most significant technological transitions in its century-long history. As the "AI everywhere" mantra moves from data centers to the driveway, the internal architecture of the modern vehicle is undergoing a radical overhaul. The primary driver of this change is the emergence of the Software-Defined Vehicle (SDV), a concept where a car’s features and functions are primarily enabled through software, requiring a robust, high-speed communication network to function. This shift is placing unprecedented pressure on in-vehicle networks (IVN) to move massive amounts of data with near-zero latency, higher determinism, and enhanced security—requirements that legacy protocols were never designed to meet.
While Automotive Ethernet is being hailed as the inevitable successor to traditional networking standards, the transition is not a simple "out with the old, in with the new" scenario. Instead, the industry is entering a prolonged era of hybrid architectures where cutting-edge Ethernet backbones must coexist with deeply embedded, low-cost legacy standards like Controller Area Network (CAN) and Local Interconnect Network (LIN).
The Bandwidth Imperative: Why Legacy Protocols are Reaching Their Limits
For decades, the CAN bus, introduced by Bosch in the mid-1980s, has been the workhorse of automotive networking. It was revolutionary for its time, allowing various Electronic Control Units (ECUs) to communicate without complex point-to-point wiring. However, CAN and its successor, CAN FD (Flexible Data-rate), typically top out at speeds of 2 to 5 Mbps. LIN, used for simple functions like power windows or mirror adjustments, operates at even lower speeds.
In the context of a modern SDV, these speeds are insufficient. A single high-resolution camera used for Advanced Driver Assistance Systems (ADAS) can generate data at rates exceeding 1 Gbps. When a vehicle is equipped with a dozen such cameras, along with Lidar, Radar, and ultrasonic sensors, the total data throughput requirements soar into the tens of gigabits per second.
"Automotive Ethernet will not fully replace CAN, LIN, or FlexRay in the near term," explains Seung-Taek Chang, SDV solution manager at Keysight Technologies. He notes that CAN and LIN remains cost-effective for non-critical, low-speed functions. However, for the high-bandwidth applications that define modern mobility—such as infotainment, autonomous driving, and real-time diagnostics—Ethernet has become the only viable backbone.
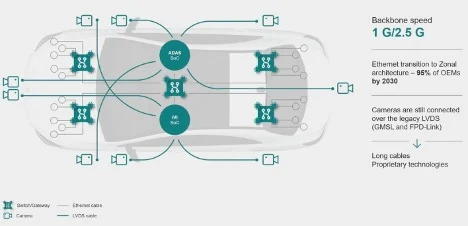
The Shift to Zonal Architecture
To manage this data explosion, automotive OEMs are moving away from "domain-based" architectures toward "zonal" architectures. In a domain-based setup, specific functions (like powertrain or infotainment) have their own dedicated controllers. As vehicles added more features, this led to a "spiderweb" of wiring that became the third heaviest and third most expensive component in the vehicle.
Zonal architecture simplifies this by grouping hardware based on its physical location in the car (e.g., front-left zone, rear-right zone). Local sensors and actuators connect to a "Zonal Gateway" using short-reach legacy protocols like LIN or CAN. These gateways then aggregate the data and send it over a high-speed Automotive Ethernet backbone to a central compute unit.

Mike Yeager, senior vice president and general manager of Ethernet solutions for Infineon Technologies’ ATV Division, highlights that these backbones currently operate between 1 Gbps and 2.5 Gbps, with 10 Gbps and even 25 Gbps solutions on the horizon. "We’re looking at moving toward complete Ethernet bridge solutions," Yeager says. By converting MIPI camera data directly to Ethernet, manufacturers can leverage higher-level protocols like Time-Sensitive Networking (TSN), which provides the nanosecond-level precision required for safety-critical functions.
Chronology of Protocol Evolution: From 1980 to 2030
The timeline of automotive networking reflects the increasing complexity of the vehicle itself:
- 1980s-1990s: The rise of CAN and LIN. Focus was on basic engine management and body electronics.
- 2000s: Introduction of FlexRay for "by-wire" applications (steer-by-wire, brake-by-wire) requiring higher determinism.
- 2010s: First appearance of Automotive Ethernet (100BASE-T1) for infotainment and diagnostics.
- 2020-2025: Rapid adoption of 1 Gbps Ethernet and the emergence of 10BASE-T1S to replace CAN at the edge. Zonal architectures begin to appear in high-end EVs.
- 2025-2030: Predicted dominance of multi-gigabit Ethernet (10G, 25G, and even 100G). Optical Ethernet may enter the market to handle extreme EMI (electromagnetic interference) environments.
Determinism, Security, and the Role of TSN
One of the primary arguments against Ethernet in the past was its "best-effort" nature. Unlike CAN, which is inherently deterministic (meaning you can guarantee when a message will arrive), standard Ethernet can suffer from packet collisions and unpredictable delays.
To solve this, the industry adopted Time-Sensitive Networking (TSN) standards, such as IEEE 802.1AS. TSN adds a layer of intelligence to Ethernet, allowing for synchronized timing and traffic prioritization. This ensures that a "braking" command from an ADAS sensor always takes precedence over a "next song" command from the infotainment system.
Security is another critical factor. As vehicles become more connected, they become more vulnerable to cyberattacks. Adiel Bahrouch, director of business development for silicon IP at Rambus, points out that Ethernet’s compatibility with MACsec (Media Access Control Security) ensures data integrity and encryption across the network, a feat much harder to achieve with legacy serial buses.
The Integration Challenge: Lessons from the F-35
Integrating these disparate technologies is proving to be a massive engineering hurdle. David Fritz, vice president at Siemens EDA, draws a parallel between the current automotive transition and the challenges faced by the military-aerospace sector, specifically the F-35 fighter jet program.
The F-35 faced years of delays because individual "Line Replaceable Units" (the aerospace equivalent of an ECU) worked perfectly in isolation but failed when connected as a system. "The reason is an engineering fallacy," Fritz explains. Engineers assumed communication between units would just happen, failing to account for the complex interactions of millions of lines of code and high-speed data arbitration.
To avoid this "integration storm" in the automotive world, Fritz argues that designers must use "digital twins"—virtual models of the entire vehicle network. These models allow engineers to simulate real-world workloads and prove that a 10 Gbps link is sufficient before a single piece of hardware is manufactured. Without this system-level modeling, the move to SDVs risks being bogged down by unpredictable failures in safety-critical loops.

Economic Realities and the Tipping Point
Despite the technical advantages of Ethernet, the automotive industry remains extremely cost-sensitive. A legacy CAN transceiver costs cents, while high-speed Ethernet PHYs (physical layer chips) and switches are significantly more expensive. Tier 1 suppliers are often hesitant to move away from commoditized, "good enough" components.
However, the "cost" of staying with legacy tech is rising. The weight of copper wiring harnesses needed to support hundreds of legacy connections directly impacts the range of Electric Vehicles (EVs). By moving to a single-pair Ethernet (SPE) solution, OEMs can significantly reduce vehicle weight and manufacturing complexity.
The tipping point will likely occur when the cost of Ethernet silicon drops due to economies of scale. Because Ethernet is used in almost every other industry—from data centers to home offices—the R&D costs are spread across a much larger base than automotive-specific protocols like FlexRay. Experts at Infineon suggest that within five to ten years, 10BASE-T1S (a 10 Mbps Ethernet standard) will become cheaper and more efficient than CAN FD, leading to the eventual sunset of the CAN bus.
Data Center Cross-Pollination and the Future of SerDes
As vehicle architectures begin to look like "servers on wheels," the automotive sector is increasingly borrowing from the data center playbook. Technologies like PCIe (Peripheral Component Interconnect Express) and high-speed SerDes (Serializer/Deserializer) are being adapted for automotive use.
William Chen of Cadence Design Systems notes that while automotive-grade SerDes must meet stricter EMI and temperature requirements than those in data centers, there is significant "technology cross-pollination." The error resilience and equalization techniques developed for hyperscale cloud providers are now finding their way into the chips that power autonomous driving processors.
The future may also see a shift toward optical Ethernet. As speeds reach 25 Gbps and beyond, copper wires become susceptible to interference and signal loss. Optical fiber offers a lightweight, EMI-immune alternative that could handle the massive data flows of Level 4 and Level 5 autonomous vehicles.
Conclusion: A Long Road Ahead
The transition from legacy protocols to Automotive Ethernet is a marathon, not a sprint. While the vision of an all-Ethernet vehicle is clear, the path there is paved with hybrid architectures and complex integration challenges. For the next decade, the "best" vehicle architecture will not be the one with the fastest network, but the one that most effectively bridges the gap between the reliability of the past and the high-speed demands of the software-defined future.
As the industry matures, the focus will shift from simply moving data to managing it intelligently. Through the use of digital twins, TSN, and zonal architectures, automakers are building the foundation for a generation of vehicles that are safer, more efficient, and capable of evolving through software long after they leave the assembly line. The CAN bus may have started the journey, but Automotive Ethernet will be the engine that drives the industry into the AI era.
